Yakamoz is a high-performance autonomous underwater vehicle developed to execute complex tasks in submerged environments. The system operates autonomously through an integration of sensors and custom-built algorithms that process real-time data and guide decision-making.
This project was developed for Teknofest by a multidisciplinary team from Hacettepe University, consisting of software, electrical, and mechanical engineering students, collaborating on the design and development of an autonomous underwater vehicle.

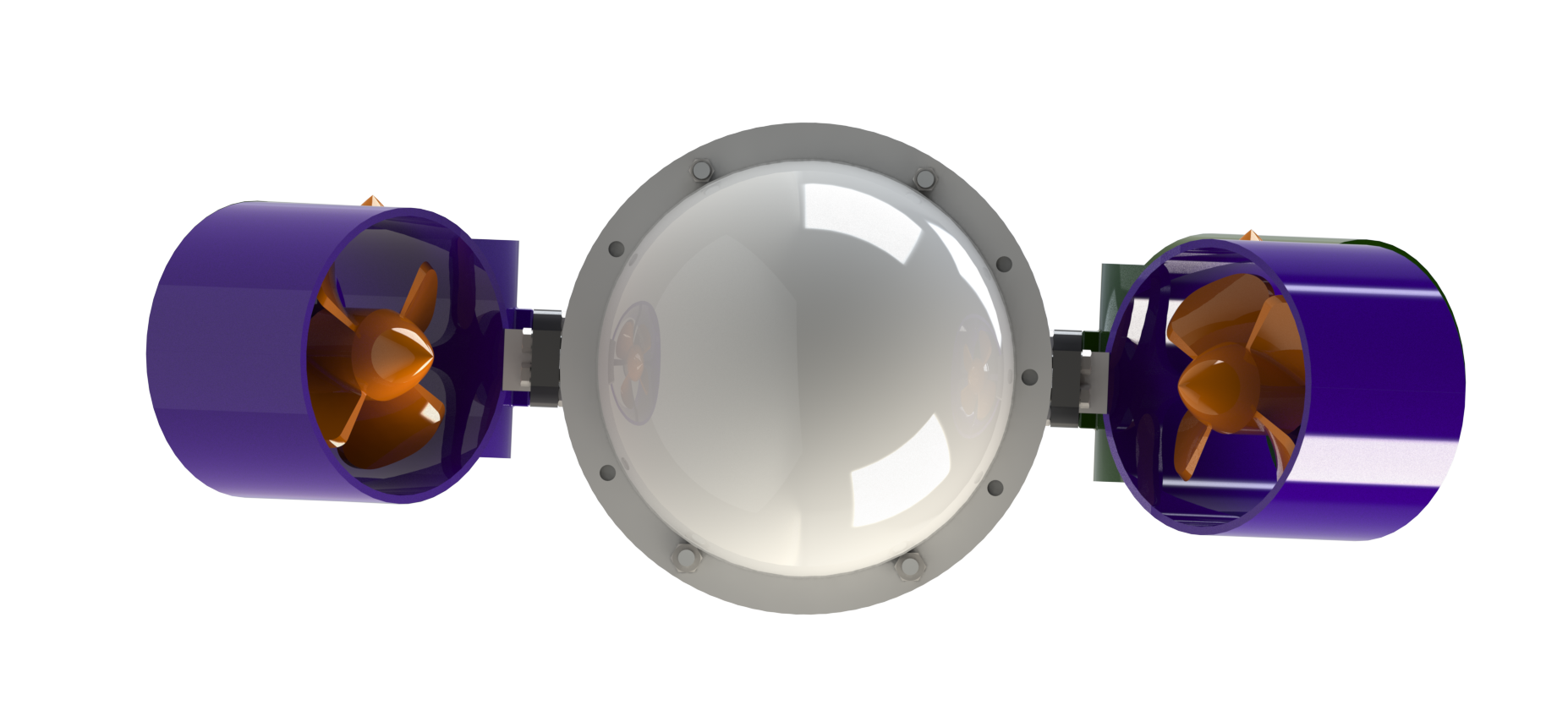
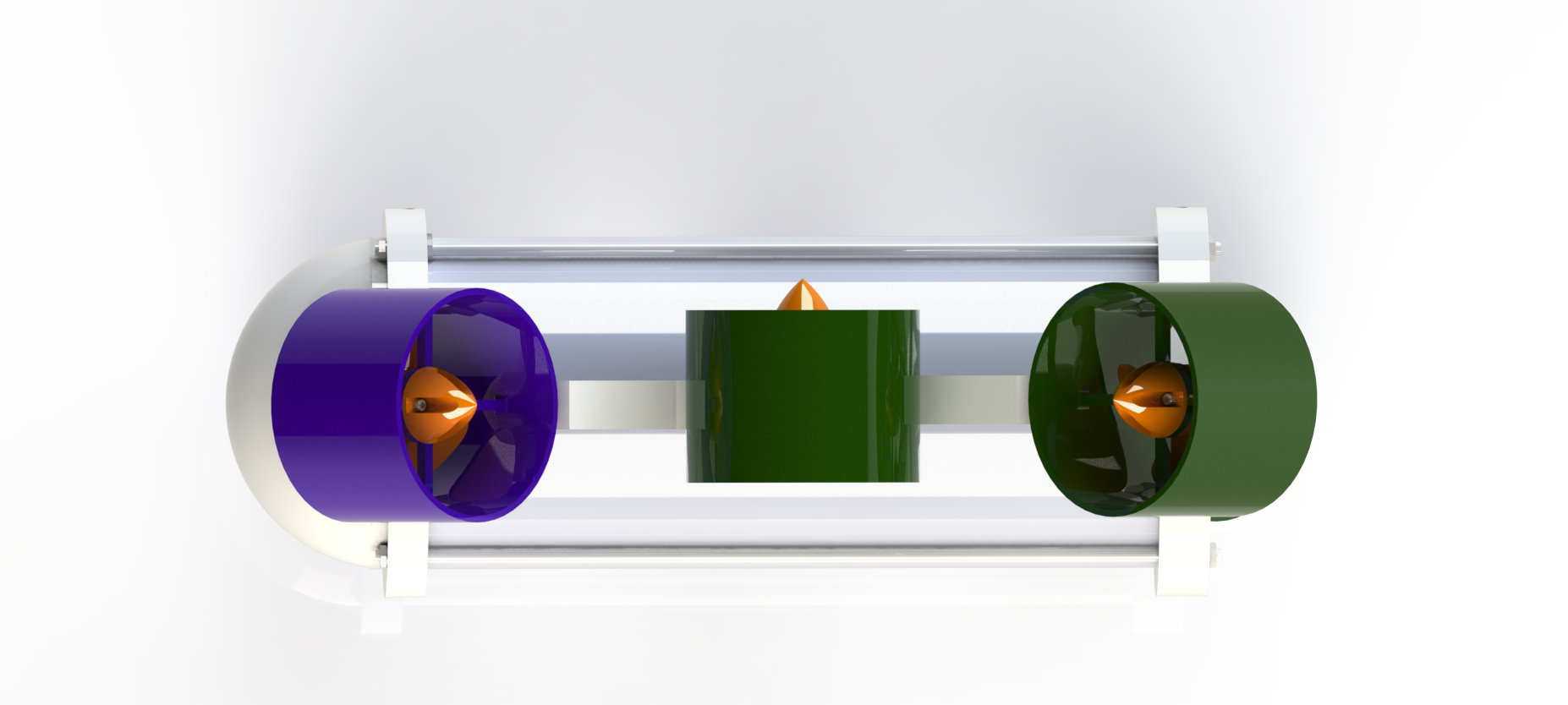
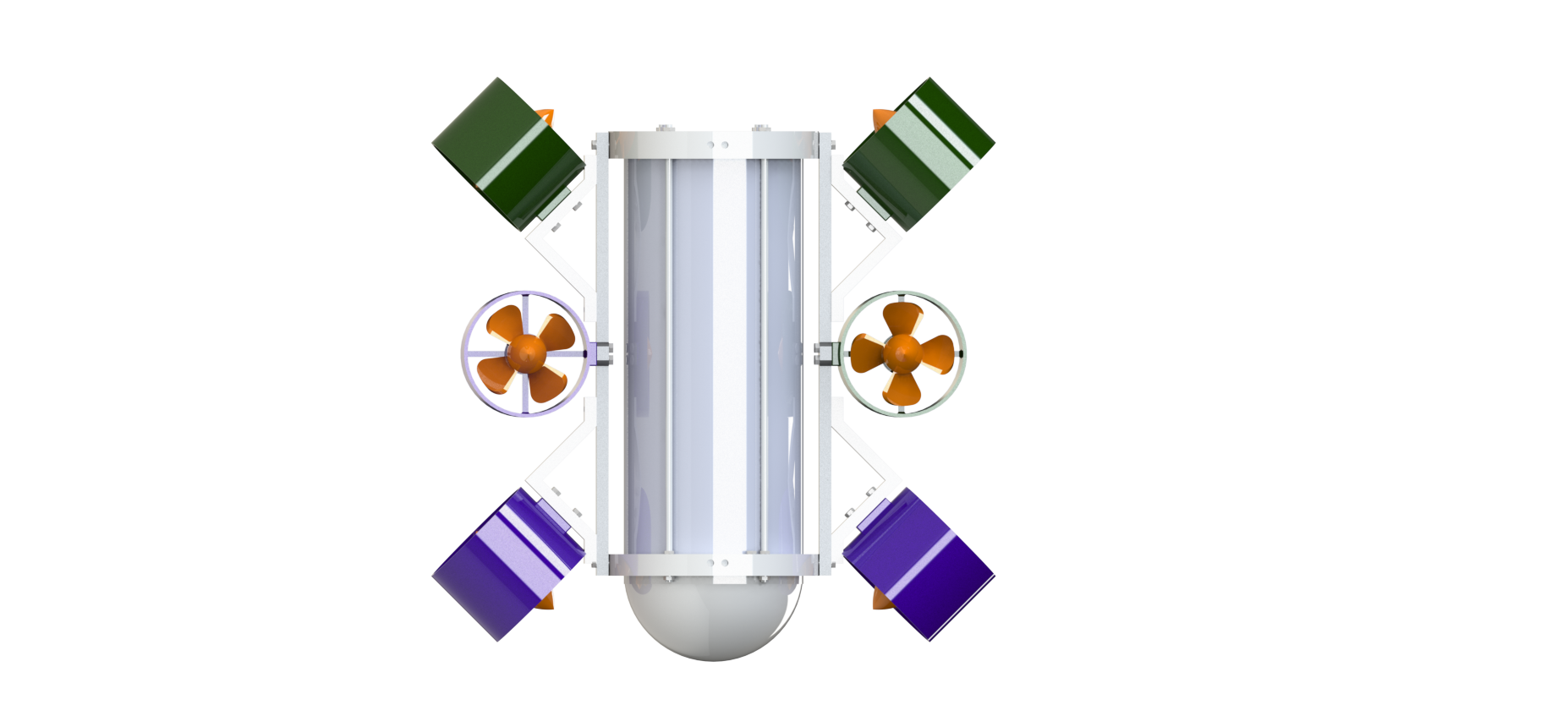
First full assembly of the AUV
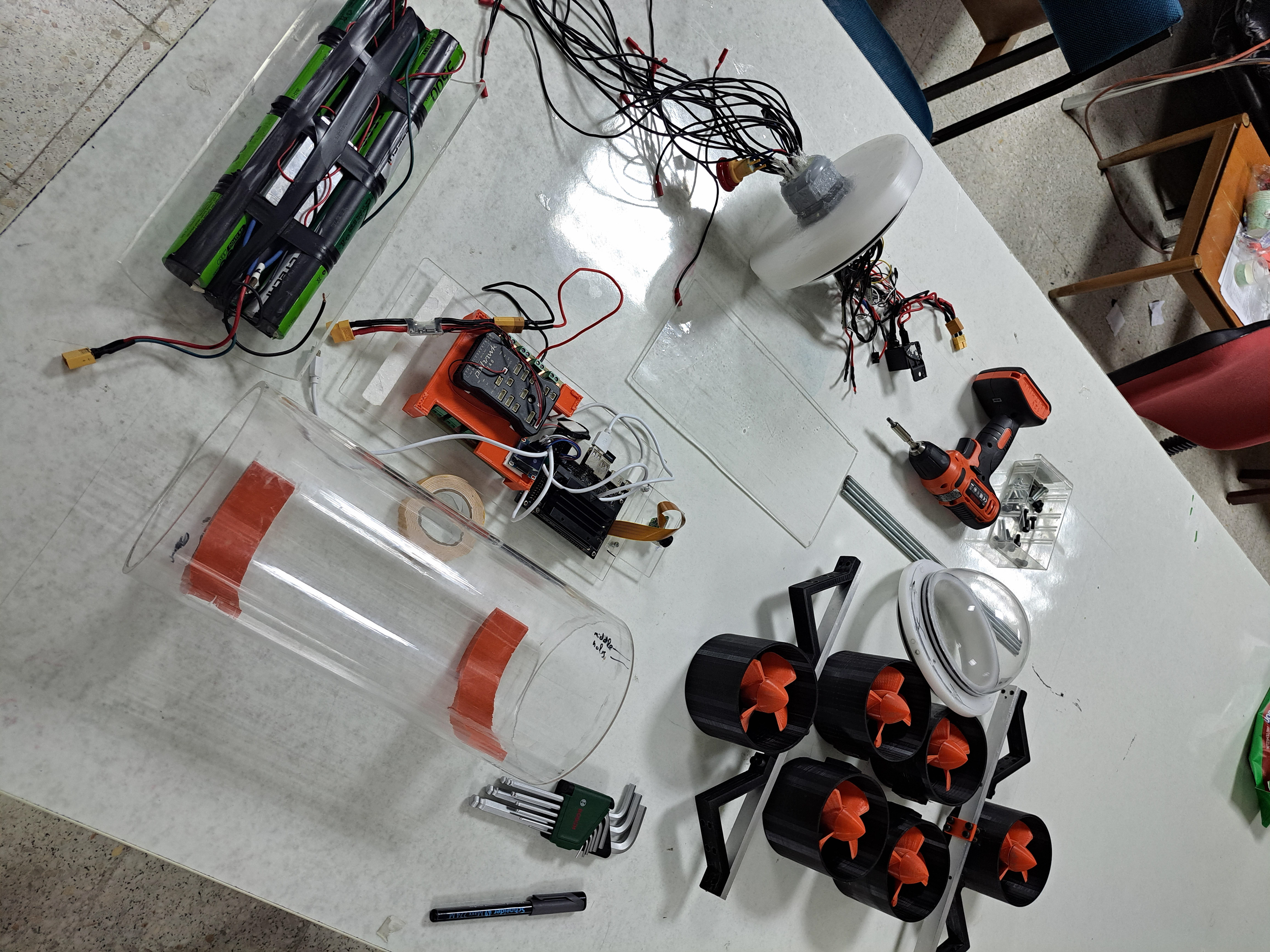
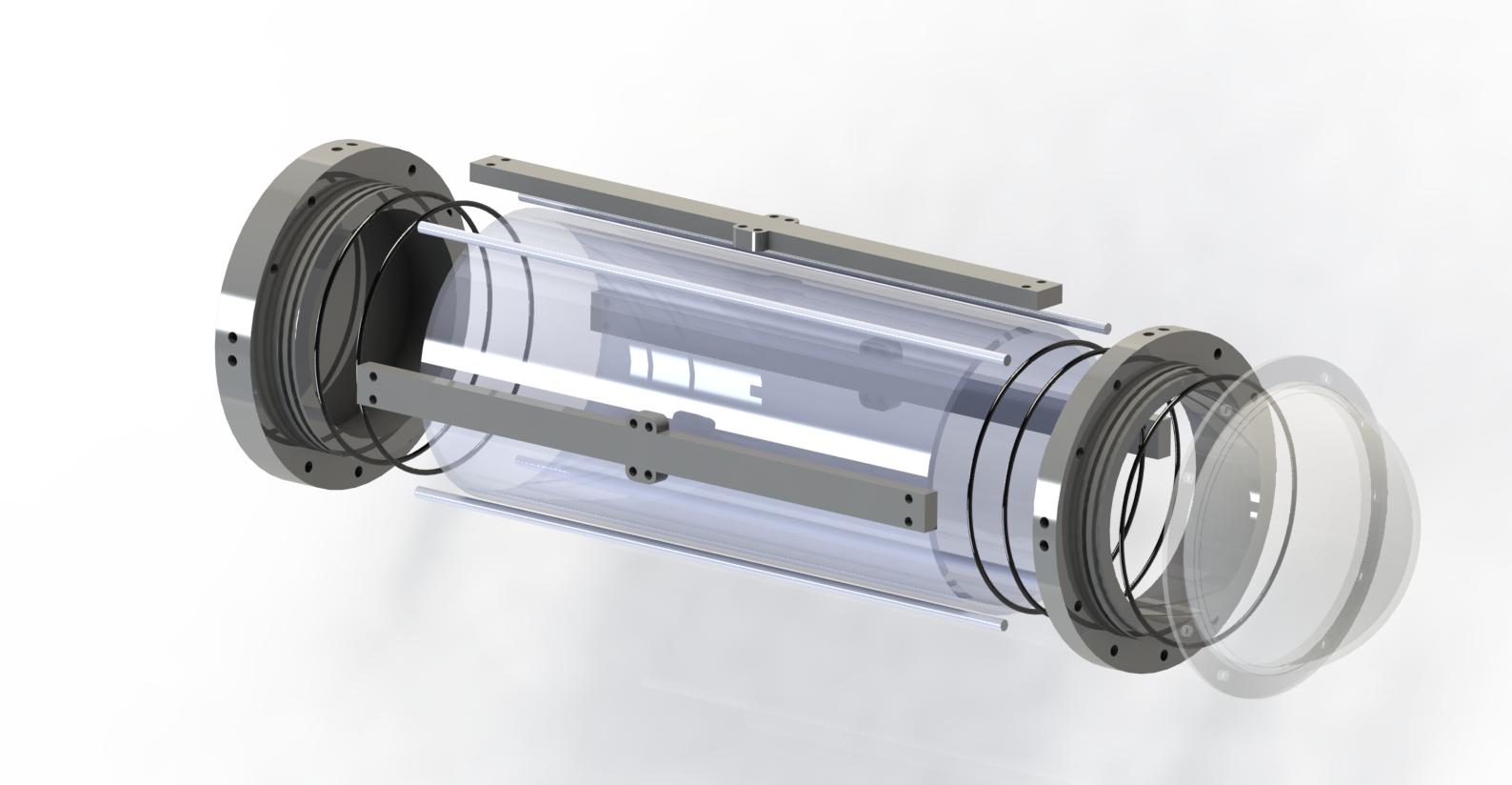
disassembly of the AUV
Role & Responsibilities
- Led the development of core mechanical systems
- Designed the vehicle body structure
- Designed and developed the thruster assembly
- Created CAD assemblies and engineering drawings
- Produced renders and technical documentation
- Developed prototype components for manufacturing
- Designed and implemented testing setups
- Designed the vehicle body structure
- Designed and developed the thruster assembly
- Created CAD assemblies and engineering drawings
- Produced renders and technical documentation
- Developed prototype components for manufacturing
- Designed and implemented testing setups
Thruster System
I designed the thruster system from the ground up, beginning with defining performance requirements such as thrust output, efficiency, and integration constraints within the vehicle. The process involved developing detailed CAD models of the propeller, housing, and internal components, followed by iterative design refinements based on mechanical feasibility and hydrodynamic considerations. I conducted simulations, including Static CFD analysis, to evaluate flow behavior and optimize performance, and complemented these with physical testing through multiple prototype iterations. Each version was assessed for structural integrity, sealing, and functional reliability under expected operating conditions. The final design was manufactured using 3D printing, allowing for precise control over geometry and rapid production, resulting in a fully functional and integrated propulsion unit.
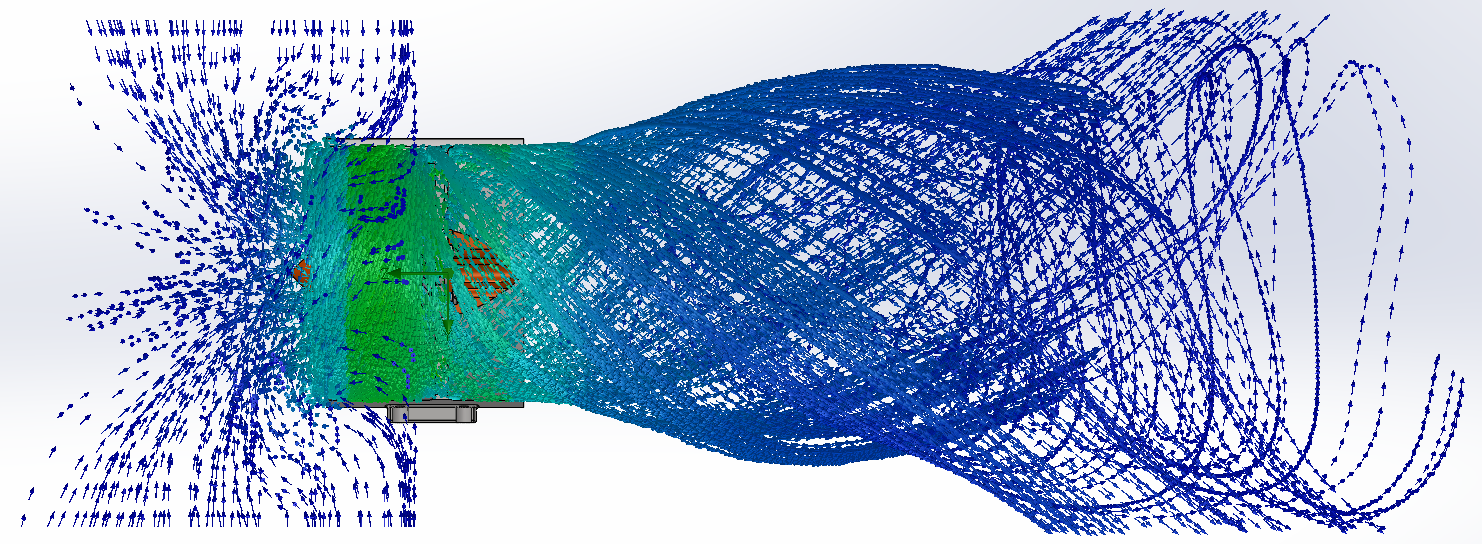
CFD

final thruster assemblies
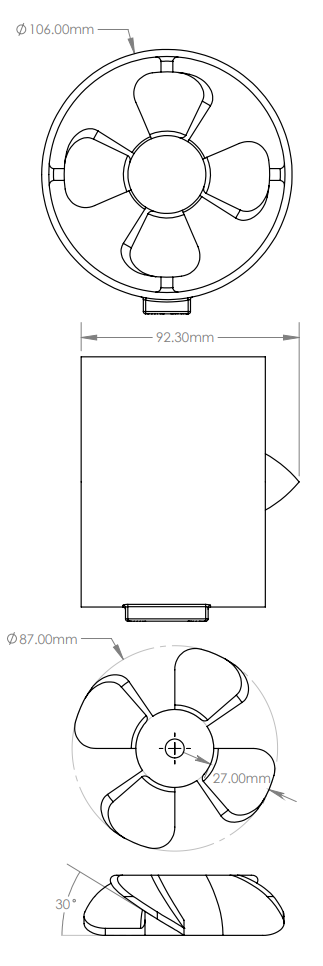
technical drawing
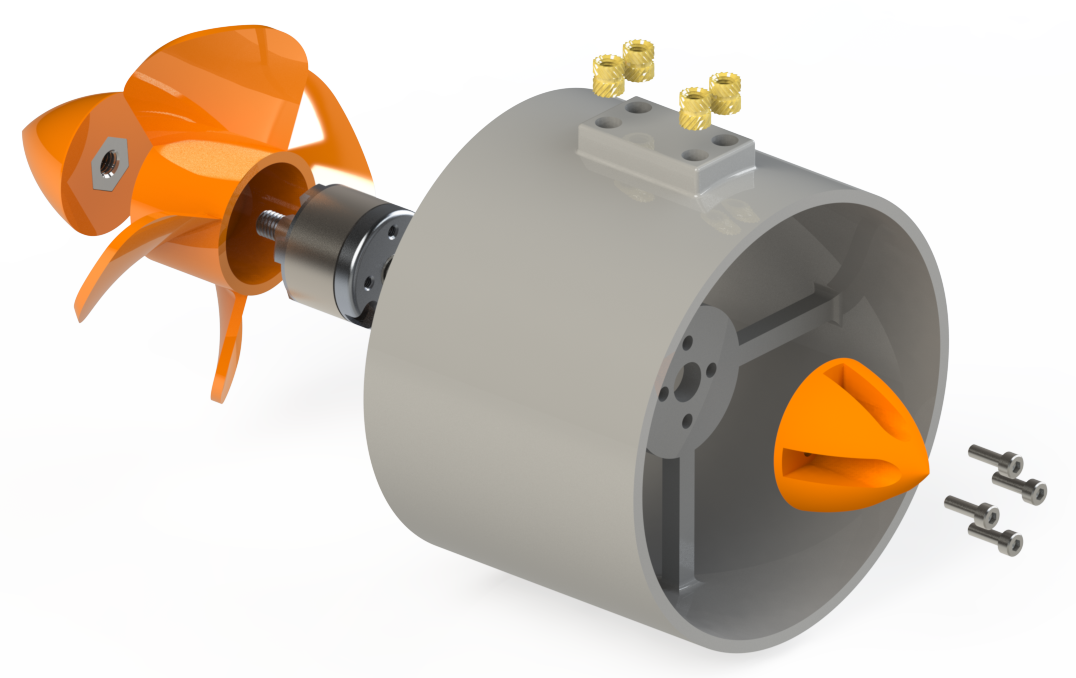
exploded view render
CFD Analysis & Simulation
Mechanical Systems
The component housing was designed as a sealed enclosure to protect electronic and mechanical parts from water exposure. It consists of a cylindrical body and a dome-shaped section made from transparent plexiglass, allowing internal components to be visually monitored while maintaining structural reliability. Internal layout was optimized to improve stability by positioning heavier elements lower in the structure.
A sealing system was developed using flanges, gaskets, and connectors to ensure full waterproofing, including protected cable pass-throughs. The internal components were mounted on a structured plate to maximize space efficiency and ensure proper isolation.
The vehicle’s chassis was designed to support propulsion and auxiliary systems, integrating structural elements for mounting thrusters and lighting. A custom propulsion system was developed and manufactured in-house, including 3D-printed components refined through design iteration and flow analysis. The system was optimized for balanced thrust, reduced vibration, and ease of assembly, with testing setups used to validate performance.
Manufacturing combined multiple methods, with complex geometries produced through 3D printing and structural elements machined for durability and precision.